Définition
Une liaison entre deux solides est un modèle de comportement cinématique.
Degrés de liberté
Attention le repère des animations est différent de celui du tableau ci-dessous.
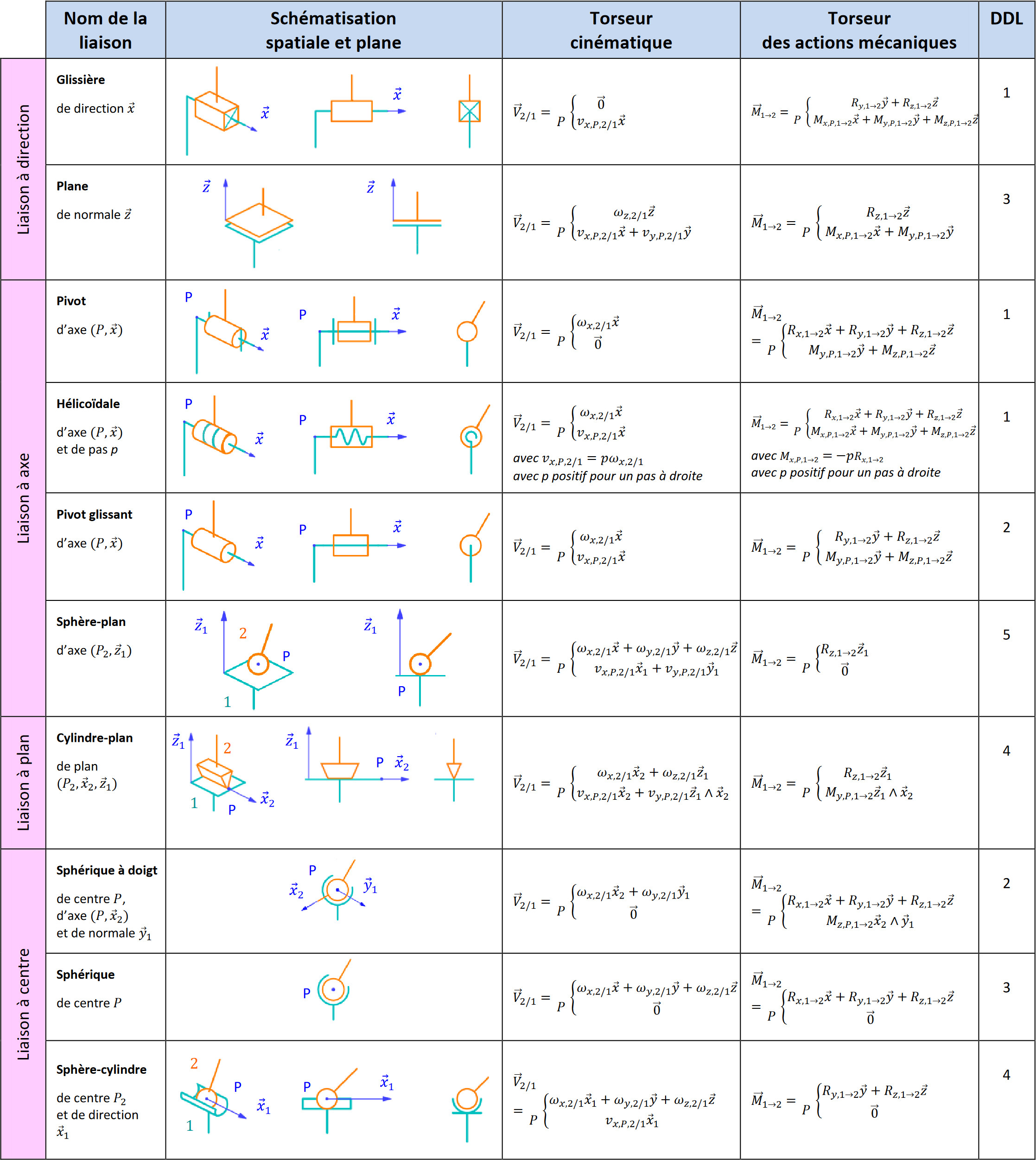
Tableau des liaisons
Tableau des 10 liaisons usuelles. On peut y ajouter la liaison complète qui à 0 DDL et la liaison libre qui a 6 DDL.
Télécharger le tableau des liaisons