
Description structurelle
Composants
À partir de consignes en provenance d'une radiocommande ou d'une application sur smartphone/tablette, mais également de mesures issues d'une centrale inertielle, un microprocesseur commande un contrôleur afin de mettre en action des moteurs brushless triphasés.
Ces derniers ont pour rôle de mettre mouvement des hélices qui, par effets aérodynamiques, exercent un effort de poussée sur l'axe de tangage du drone matérialisé par le balancier.
Sur la centrale inertielle, on trouve : - un gyromètre, dont la mesure de vitesse angulaire est intégrée pour déterminer la position angulaire de l'axe de tangage ; - un accéléromètre utilisé en inclinomètre qui permet aussi de mesurer la position angulaire de l'axe de tangage . Ces deux mesures sont associées pour assurer de meilleures performances à l'asservissement en position angulaire de l'axe de tangage. | 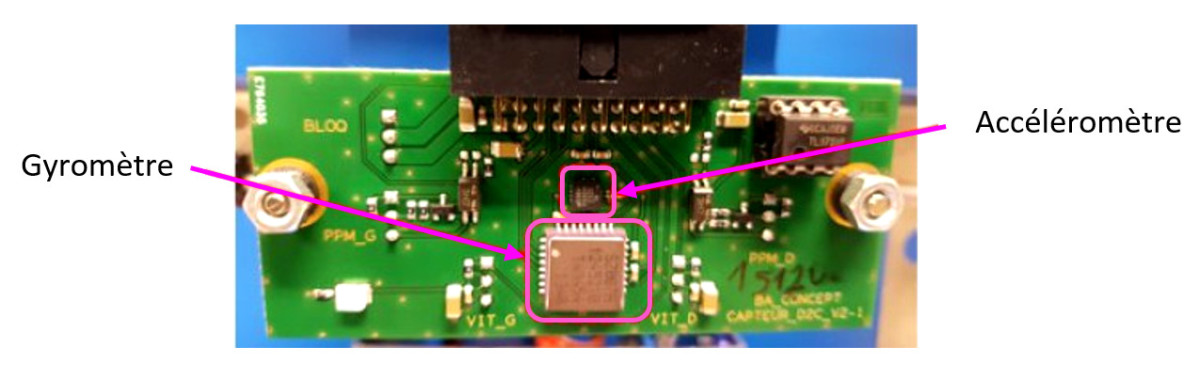 |
Instrumentation
En plus des éléments existants sur le système en utilisation normale, le système du laboratoire a été instrumenté (rajout d'éléments). Afin d'enregistrer plusieurs grandeurs physiques, des capteurs et prises de mesure ont été installés. Ces éléments supplémentaires sont :
- 1 détecteur optique au niveau de chacune des hélices afin de mesurer la vitesse angulaire ;
- 1 capteur magnétique sans contact à effet hall permettant de mesurer la position angulaire du balancier par rapport au bâti fixe, au niveau de l'axe de rotation ;
- 1 arc de cercle gradué permettant de relever « à l'œil », la position angulaire du balancier ;
- 1 capteur d'effort à jauges de déformation qui permet, à l'aide d'une tige pouvant être installée, de mesurer l'effort de poussée du moteur droit ;
- 1 accès aux grandeurs électriques tension et intensité de chacun des deux moteurs.




