
Documentation technique
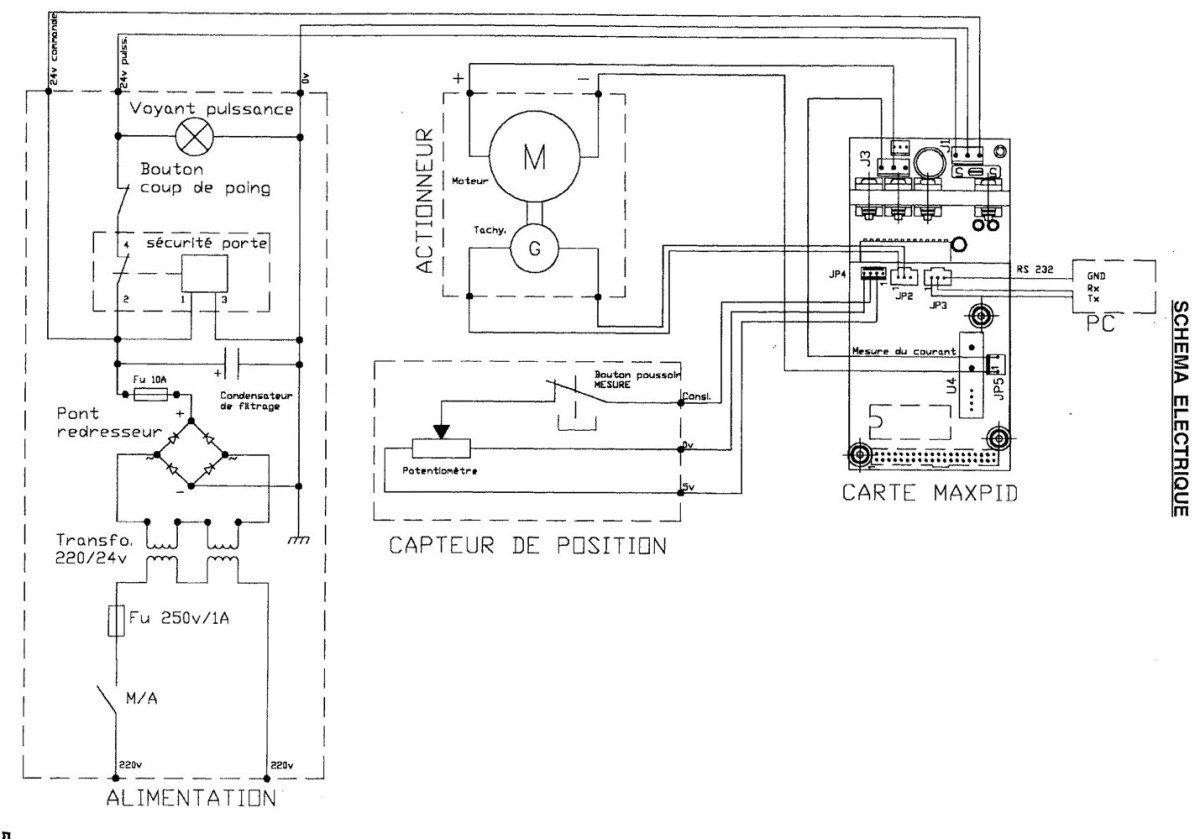
Préactionneur : la carte de puissance (composée de hacheurs)
La commande numérique PWM reçue par la carte de puissance est codée sur 9 bits, soit 29 = 512 valeurs, dont 1 bit est réservé au signe. Selon cette commande numérique PWM, comprise alors entre -256 et +256 uc, le hacheur délivre une tension d'alimentation au moteur comprise entre -24 et +24 V.
Actionneur : le moteur à courant continu
Le moteur utilisé est un MDP RE035G :
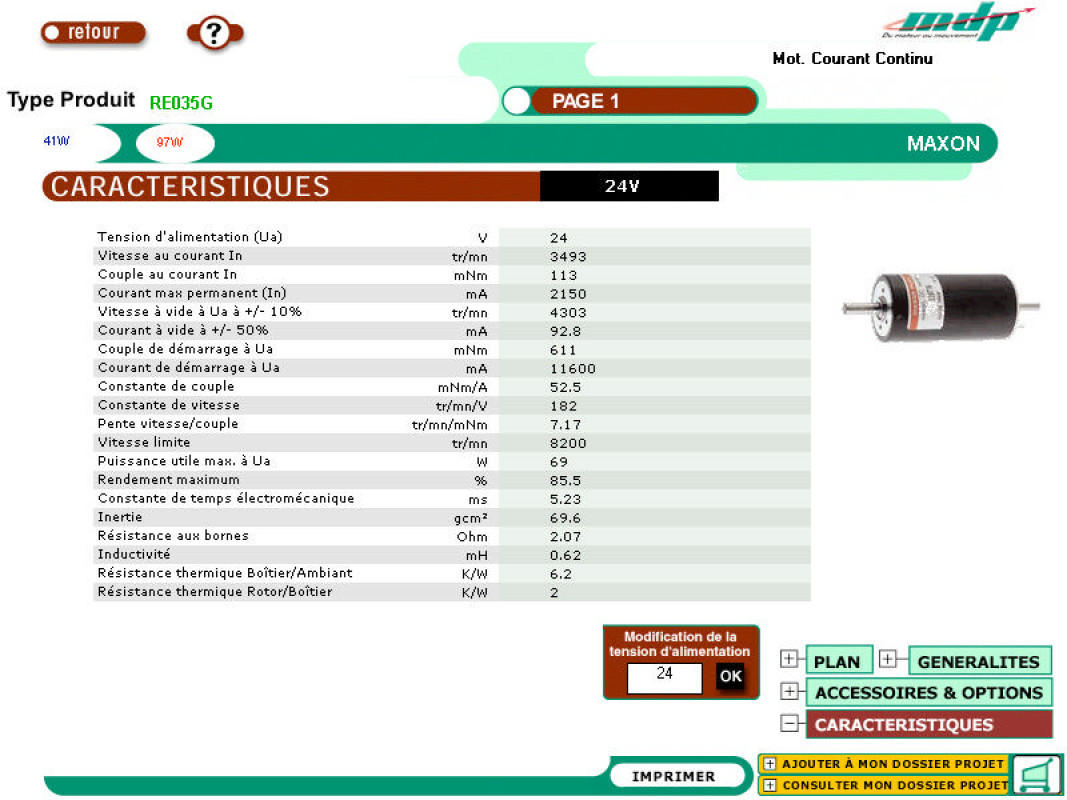
Attention dans le cas où le modèle du moteur est intégré dans un schéma-bloc, on utilisera :
J = 1,05.10-4 kg.m2 : inertie équivalente de tous les solides en mouvement, ramenée sur l'axe moteur, pour le Maxpid en position horizontale (à plat sur la table) avec 2 masses, et pour un angle du bras compris entre 30° et 70° ;
f = 8,9.10-5 N.m/(rad/s) : coefficient de frottement visqueux dans les liaisons du mécanisme, ramené sur l'axe moteur ;
Cr = 4,86.10-2 N.m : couple résistant dû aux frottements secs dans les liaisons du mécanisme, ramené sur l'axe moteur.
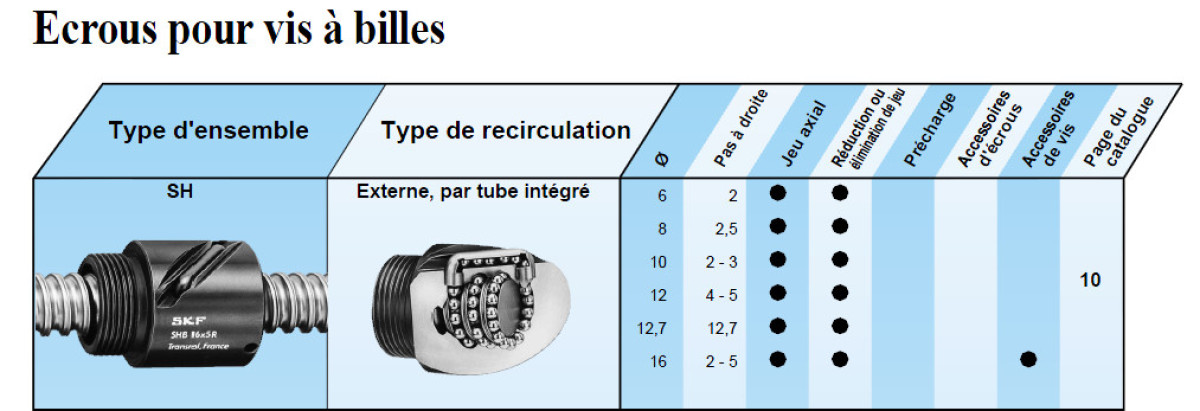
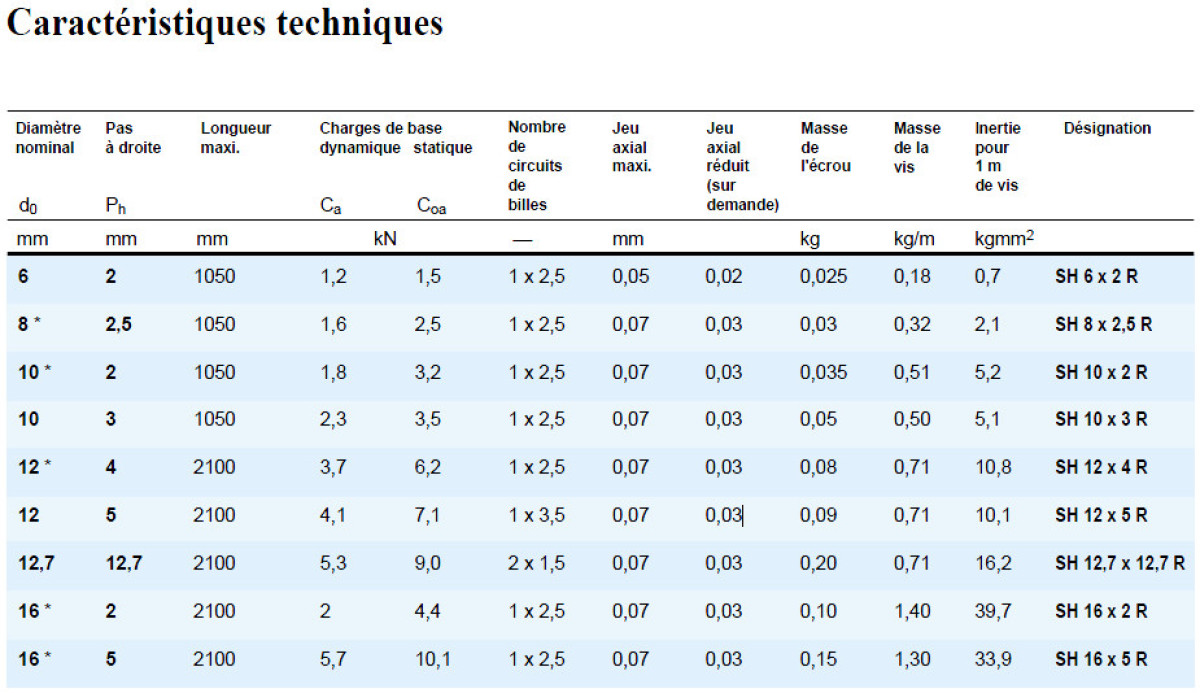
Transmetteur : le vis-écrou à billes
La vis utilisée sur ce système est une vis SKF ayant pour référence SD 12x4 R.
L'écrou est à billes.
NB : un tour de la vis fait avancer d'un pas l'écrou.
Capteur : le potentiomètre rotatif + CAN
Le potentiomètre rotatif délivre une tension comprise entre 0 et 5 V pour une course électrique comprise entre 0 et 94° (voir documentation ci-dessous).
Il est associé à un CAN (Convertisseur Analogique Numérique) codant sur 12 bits, soit 212 = 4096 valeurs. C'est à dire que la mesure comprise entre 0 et 5 V est convertie entre 0 et 4096 points.

Capteur : la génératrice tachymétrique
La génératrice tachymétrique délivre une tension de 0,52 V/1000tr/min.





