Fonctionnement
Mise en marche
Appuyer sur le bouton "ON/OFF".
Vérifier que le bouton d'arrêt d'urgence n'est pas enclenché.
Lancer le logiciel "Interface Maxpid-V2".
L'interface homme machine suivant apparaît :
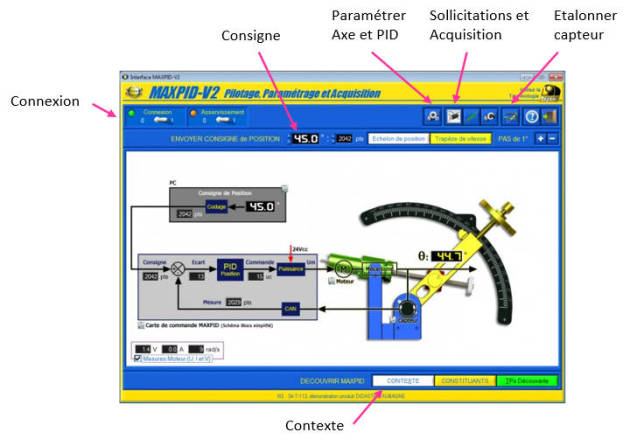
Cliquer sur "Contexte" et lire brièvement la documentation.
|  |
|  |
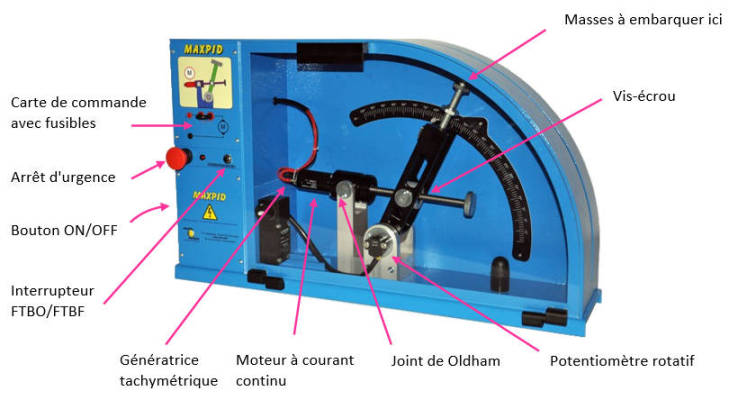
Le bras du Maxpid est pourvu à son extrémité, d'un système de fixation des masses de 650gr. Une clé plate permet de serrer fermement ces masses. Il est très important de s'assurer de ce serrage, car les accélérations du Maxpid peuvent être très brusques et projeter les masses de façon violente.
Placer une masse de 650gr à l'extrémité du bras. Serrer l'écrou.
Placer le bras en position initiale à 0° en appuyant sur "Trapèze de vitesse" . Cette commande permet de réaliser un déplacement progressif.
Commande du Maxpid
|  |
Attention :
Ne pas donner une consigne en échelon trop près du bord, 0° ou 110°. Car avec un correcteur proportionnel mal réglé le premier dépassement peut heurter les butées !
|