Description structurelle
Principaux constituants
Afin de bien comprendre le fonctionnement de ce système, il est nécessaire de comprendre d'abord le fonctionnement de ses principaux constituants.
- hacheur ;
- moteur à courant continu ;
- joint d'Oldham ;
- vis-écrou ;
- potentiomètre rotatif.

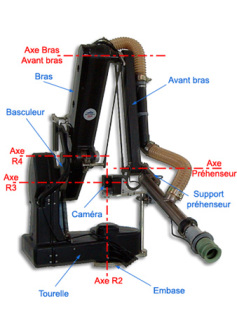
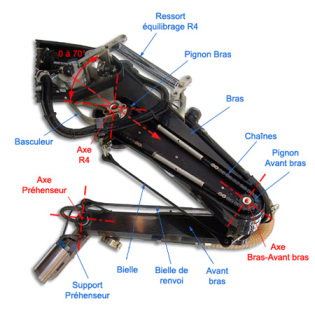
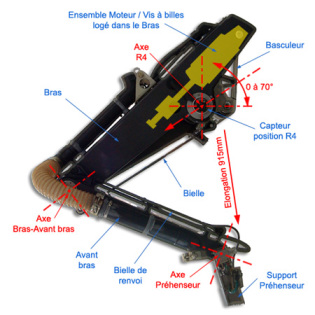
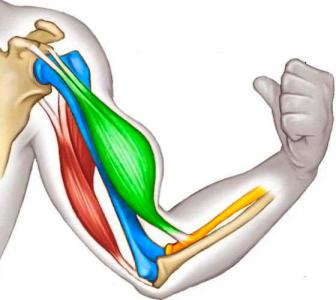
Ce robot anthropomorphe reprend la structure d'un bras humain.
La maquette Maxpid est l'articulation entre le bâti et le premier bras du robot de récolte d'oranges « Citrus ». A partir des consignes de position en provenance d'un logiciel de pilotage mais également de mesures issues d'un potentiomètre rotatif, un microcontrôleur commande une carte de puissance, composée de hacheurs, afin de mettre en action un moteur à courant continu. Le mouvement de rotation du rotor moteur est transmis à une vis, liée à l'axe du rotor moteur par un accouplement mécanique du type joint de Oldham. Un transmetteur vis-écrou transforme le mouvement de rotation de la vis en mouvement de translation de l'écrou. Ce mouvement de translation de l'écrou est ensuite converti en mouvement de rotation du bras, grâce à une chaîne fermée. Le potentiomètre rotatif permet de mesurer la position angulaire du bras par rapport au bâti. Il est associé à un CAN (Convertisseur Analogique Numérique). |