
Mise en situation
La maquette MAXPID est un sous-ensemble extrait d'un robot de récolte d'oranges développé par la société PELLENC S.A. de PERTUIS (Vaucluse). Ce robot est capable de repérer et de localiser automatiquement une orange mûre grâce à un système de vision artificielle. Une fois localisée, l'orange est saisie par une ventouse montée en bout du bras. | 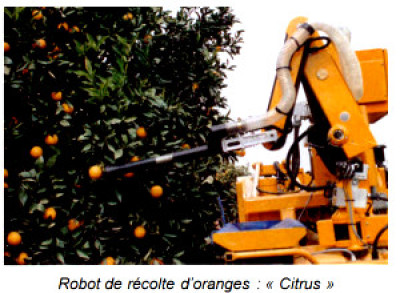 |
 | L'orange ne pourra être saisie et détachée de l'arbre que si la position du bras est parfaitement contrôlée : le bras doit se positionner à l'endroit voulu pour assurer un bon contact de la ventouse et de l'orange, et éviter des mouvements nuisibles (vibrations par exemple). |
La société Pellenc qui développe ce produit, conçoit d'autres systèmes automatisés utilisant ce dispositif :

Tous ces systèmes présentent plusieurs bras rigides articulés entre eux. La maquette Maxpid est une articulation entre deux bras rigides que l'on rencontre sur le robot de récolte d'oranges « Citrus » ci-dessus. |  |




