
Documentation technique
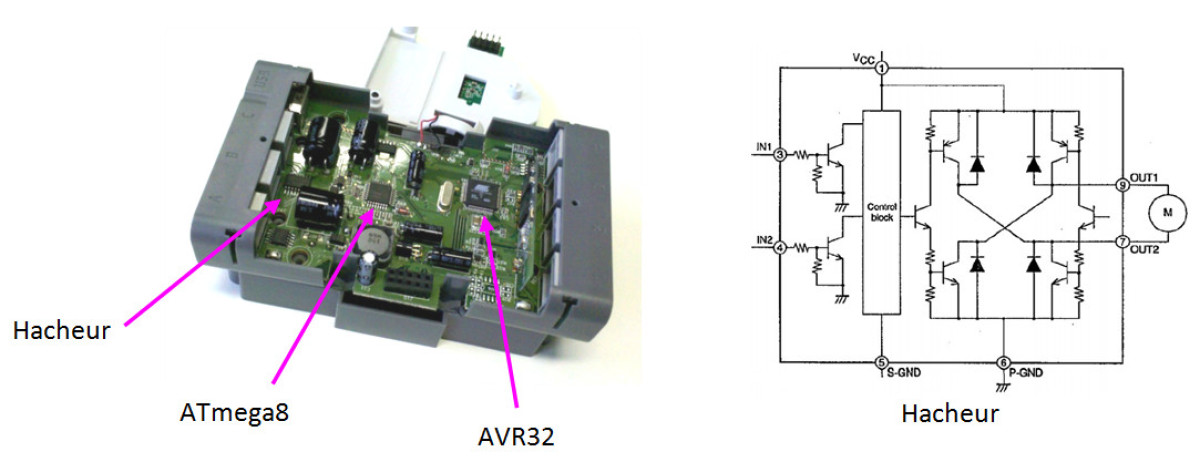
La brique NXT
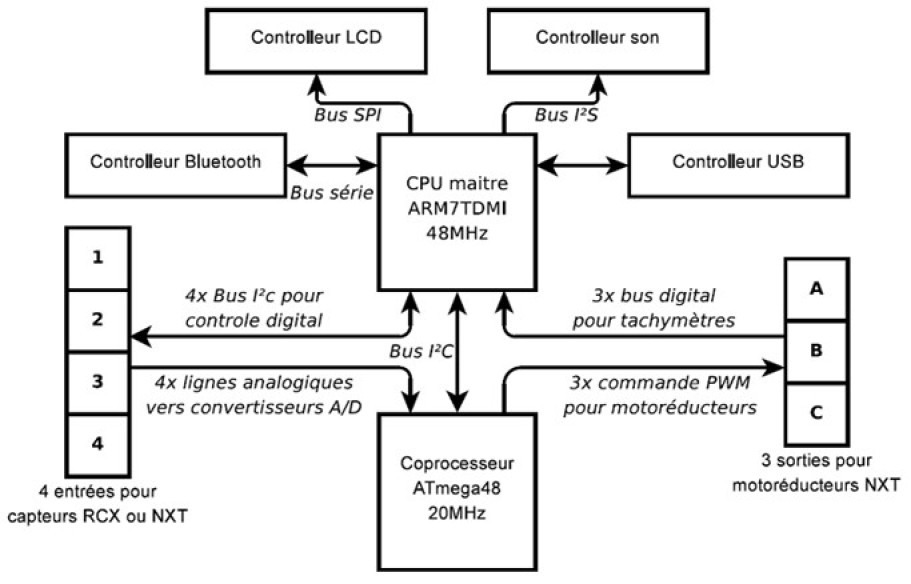
 | La brique NXT fait office d'unité de commande programmable et de pré-actionneurs. Elle comporte : - Microprocesseur ARM7 32 bits ; - 256 Ko de mémoire flash, 64 Ko de RAM ; - Microcontrôleur ATMega 8 bits ; - 4 Ko de mémoire flash, 512 octets de RAM ; - Communication sans fil Bluetooth (conforme à la norme Bluetooth de classe Il V2,0) ; - 1 port USB 2.0 (12 Mbps) ; - 4 ports d'entrée (1, 2, 3, 4) plate-Forme numérique à câbles à 6 fils ; - 3 ports de sortie (A, B, C) plate-forme numérique à câbles à 6 fils ; - Écran graphique LCD 100 x 64 pixels ; - Haut-parleur - qualité sonore 8 kHz Canal audio avec résolution 8 bits et Fréquence d'échantillonnage 2-16 KHz ; - Alimentation électrique : 6 accumulateurs AA 1,2V. Un régulateur PID permet d'optimiser les performances du système. |
L'architecture interne du NXT :
Hacheur
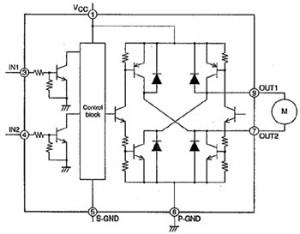 | Le hacheur est modélisé par une constante car il s'agit en réalité d'un premier ordre dont la constante de temps est très faible devant le reste du système. |
Servomoteur EV3
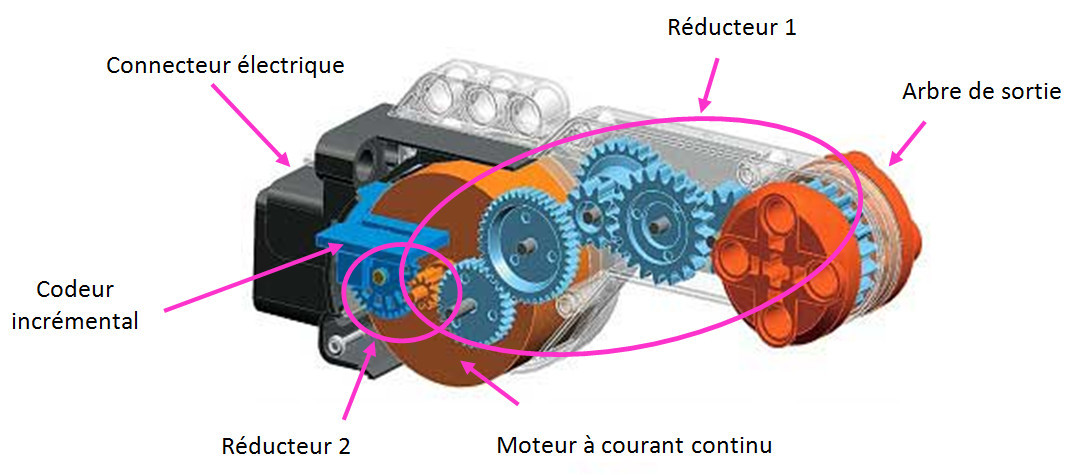
Le servomoteur EV3 se compose d'un moteur à courant continu qui entraîne l'arbre de sortie par l'intermédiaire d'un train simple d'engrenages de rapport r1. Le mouvement est contrôlé à l'aide d'un capteur de position et sa roue codeuse, qui mesure la position du moteur par l'intermédiaire d'un engrenage de rapport r2.
Etages de réduction du réducteur 1 :
- Etage 1 : 10, 30, 40 ;
- Etage 2 : 9, 27 ;
- Etage 3 : 10, 20 ;
- Etage 4 : 10, 13, 20.
Etages de réduction du réducteur 2 :
- Etage 1 : 10, 32.
Codeur incrémental
 | Le servomoteur EV3 dispose d'un capteur de rotation intégré permettant aux programmes NXT-G de contrôler avec précision le nombre de tours ainsi que la vitesse. |
 | - Le codeur incrémental fourni 2 impulsions (ou points) par encoche. - La roue codeuse comporte 12 encoches. |




