
Documentation technique
Réducteurs et codeurs
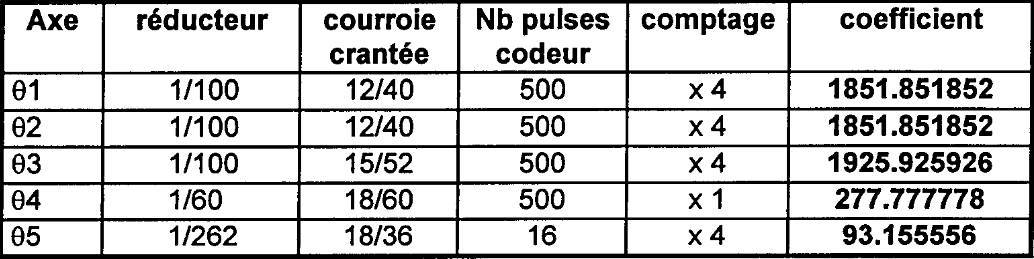
Coefficient = nombre d'impulsions codeur correspondant à 1 degré sur l'axe final.
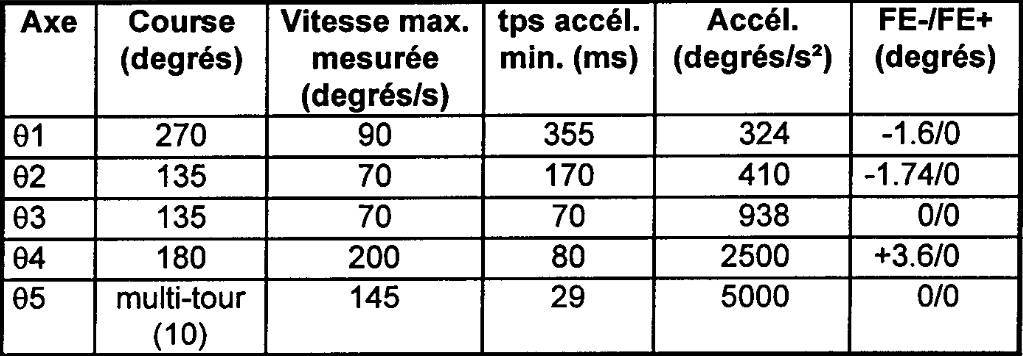
Performances
Angles :
Lacet | Epaule | Coude | Poignet | Pince: |
θ1 = ± 135° | θ2 = + 90°/- 45° | θ3 = - 42°/+ 47° | θ4= ±90° | θ5 = ± 180° |
Les erreurs de poursuite mini et maxi (FE-/FE+) ont été mesurées dans la configuration « bras tendu » avec une charge de 1 kg.
La vitesse linéaire maximum est donnée en prenant en compte les mouvements du lacet et de l'épaule (Rmax =0.7525 m) :
- contribution du lacet : 1.182 m/s ;
- contribution de l'épaule : 0.919 m/s ;
- vitesse cumulée : 1.497 m/s.




