
Description structurelle
La figure ci-contre, relative à un robot 5 axes, illustre les positions des axes de rotation. La définition des axes est la suivante :
Ces différentes articulations permettent de réaliser de nombreux mouvements. La pince peut être remplacée par un outil spécifique, pour effectuer des opérations de collage, de soudage, de peinture, de manutention de pièces, etc. Le robot Ericc 3 présent dans le laboratoire est lui muni d'une pince pneumatique à mors (doigts) parallèles. | 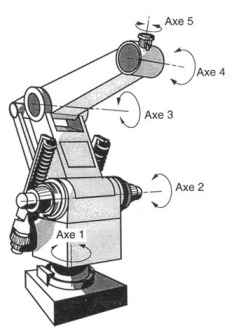 |
Partie Opérative
Les trois premiers axes, en partant de la base du robot, sont organisés sur le même principe, qui comprend :
- un moteur à courant continu,
- un premier réducteur à fort rapport de réduction « Harmonic Drive »,
- suivi d'un second réducteur poulie-courroie,
- un codeur incrémental angulaire (ou roue codeuse) qui permet de mesurer la vitesse de rotation et la position angulaire de l'axe,
- et enfin un capteur TOR inductif (associé à une came)
Le préactionneur des 5 moteurs se situe sous la table (boîtier de grande taille avec bouton arrêt d'urgence). C'est un variateur électronique.
Partie Commande
La commande de chaque moteur est une commande asservie en position par l'intermédiaire de codeurs incrémentaux. Elle est assurée par une commande d'asservissement multiaxes intégrant le pilotage en courant des moteurs.




