
Fonctionnement (avec carte arduino)
Mise en marche
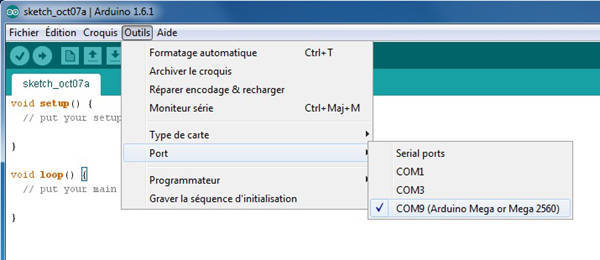
Réaliser la connexion au système :
|  |
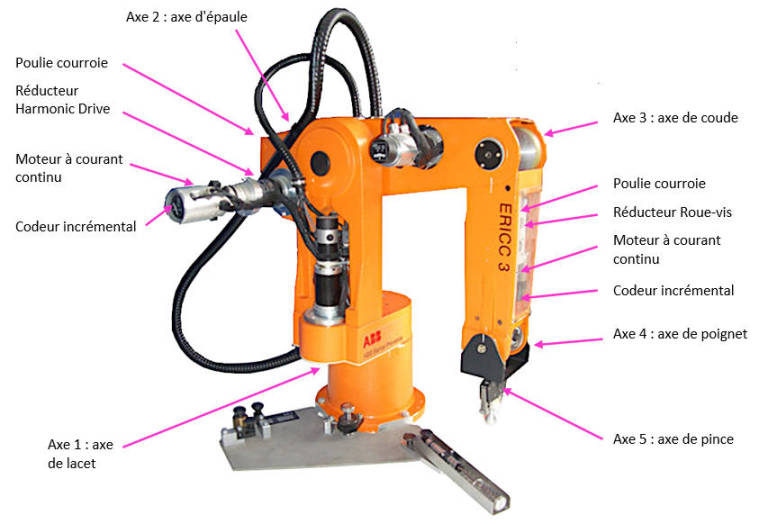
Commande du poignet
Attention :
Ne pas cliquer sur le bouton "Téléverser", qui enverrait un programme vide vers la carte Arduino !
|  |
|  |
Réaliser la "Mise au zéro de l'axe" en rentrant le chiffre correspondant dans la barre.
Réaliser un essai "Asservissement de position" en rentrant le chiffre correspondant dans la barre.
Renseigner un réglage du correcteur PID dans la barre :
Correcteur proportionnel Kp | 20 |
Correcteur intégral Ki | 0 |
Correcteur dérivé Kd | 0 |
Puis renseigner une valeur de consigne de position angulaire dans la barre :
Echelon de position angulaire θc (°) | 60 |
Le poignet Ericc tourne, puis se stabilise.
Vous obtenez des mesures donnant : Date, Consigne, Sortie, Courant consigne, Mesure, Commande, Courant
Commande de l'épaule
Attention :
Ne pas cliquer sur le bouton "Téléverser", qui enverrait un programme vide vers la carte Arduino !
Dans l'onglet "Outils/Type de carte" vérifiez que le matériel est connecté sur "Arduino/Genuino Uno".
Dans l'onglet "Outils/Port:" vérifiez que le matériel est connecté sur "COM...".
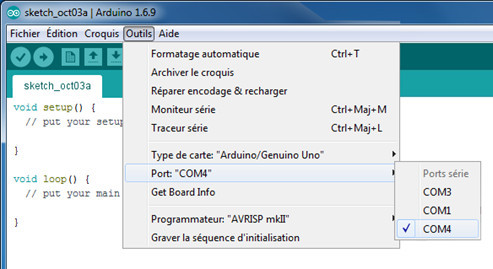
Cliquer sur l'icône "Moniteur Série" ou dans "Outils/Moniteur série".
En bas à droite, sélectionner la vitesse d'échange des données entre ARDUINO et PC doit être de 115200 baud (bits/s), cliquer sur "Nouvelle ligne" et cocher "Défilement automatique".
La fenêtre suivante apparaît :
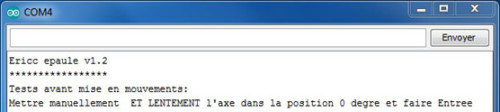
Réaliser l'initialisation proposée par l'interface.
Attention :
Si le bras de l'axe d'épaule du Robot Ericc reste bloqué c'est qu'il y a un problème de contact au niveau des câbles électrique et que le frein à manque de courant du moteur n'est plus alimenté.
L'interface homme machine suivant apparaît :
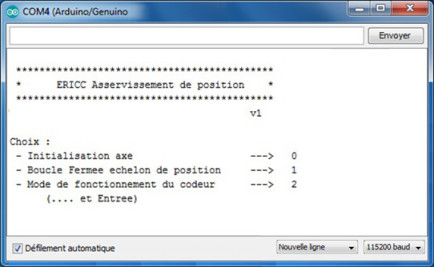
Réaliser un essai "Boucle Fermée échelon de position" en rentrant le chiffre correspondant dans la barre.
Renseigner un réglage du correcteur PID dans la barre :
Correcteur proportionnel Kp | 20 |
Correcteur intégral Ki | 0 |
Correcteur dérivé Kd | 0 |
Puis renseigner une valeur de consigne de position angulaire dans la barre :
Echelon de position angulaire θc (°) | 45 |
Le bras Ericc tourne, puis se stabilise.
Vous obtenez des mesures donnant : Date, Consigne, Mesure, Tension moteur, Commande.




