
Fonctionnement
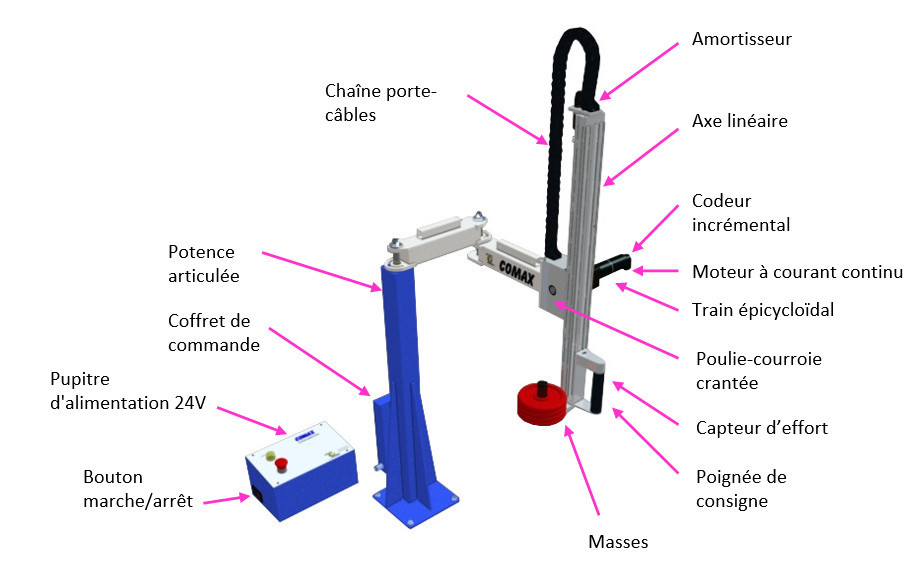
Contextualisation
|  |
Mise en marche
Vérifier que le bras est en position basse.
Appuyer sur le bouton ON/OFF de l'alimentation 12V.
Vérifier que le bouton d'arrêt d'urgence n'est pas enclenché.
Vérifier que les masses embarquées sont correctement fixées.
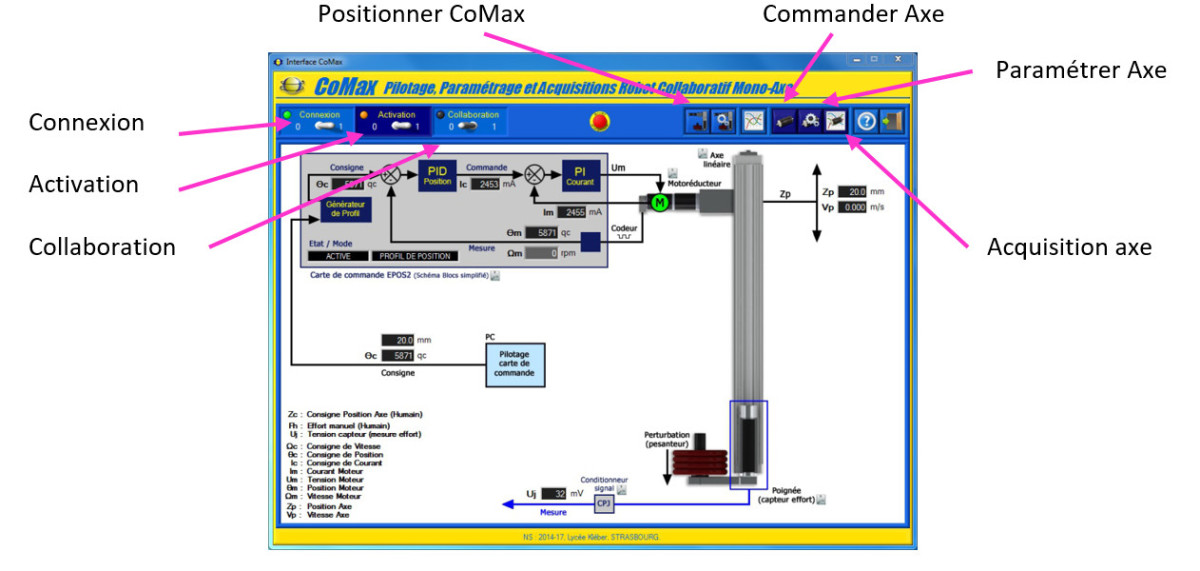
Commande du CoMax
|  |
L'interface ci-dessous apparaît : |
Attention :
Même si vous êtes certain de vos réglages, ne validez JAMAIS un nouveau réglage (gains des correcteurs) si le CoMax n'est pas en position basse. Sinon le robot CoMax chutera brutalement, avec un gain trop faible.
De plus, si vous coupez l' "Activation" lorsqu'il est en position haute il tombera par réversibilité.
Commandes principales : passage des modes « CONNEXION – ACTIVATION – COLLABORATION »
Cette page vous permet d'avoir un aperçu rapide des possibilités offertes par le logiciel "Interface CoMax".
Cliquer sur l'icône "Positionner CoMax" et commander l'axe en position Inter, Haute puis Basse.
|
|




