
Mise en situation
La cobotique
La cobotique est une évolution émergente de la robotique. Elle est constituée par l'interaction entre un être humain et un robot programmé pour l'assister dans ses mouvements difficiles. Les applications sont nombreuses : militaires, prothèses médicales, sécurité civile, déplacement de charges... |  |
 | Contrairement aux robots classiques, les cobots (contraction de "Robots collaboratifs") ne remplacent pas l'homme mais l'assistent dans ses tâches, avec pour objectif d'en diminuer la pénibilité et par conséquent de réduire les risques de TMS (troubles musculo squelettiques). |
Le robot CoMax est une version didactisée d'un robot d'aide à la manutention, développé par la société SAPELEM.
Le système repose sur l'utilisation d'un système de levage motorisé à câble associé à une poignée communicante intégrant le capteur d'effort.
A des fins ergonomiques, l'objectif de la fonction collaborative est de faire ressentir une masse légère à l'usager même si le robot avec lequel il collabore déplace une lourde charge.
Afin que l'humain puisse coopérer de façon intuitive avec le robot, l'humain est dans la boucle de commande et interagit avec le robot.
La commande collaborative consiste à mesurer l'intention de l'humain, force appliqué sur la poignée de manutention (capteur d'effort) et de calculer (consigne de vitesse) la réaction dynamique du robot correspondante.
Exemple :
- Déplacement de charges :
- Les exosquelettes :
- Vissage de paumelles :
- Ebavurage de pièces usinées :
A des fins ergonomiques, l'objectif de la fonction collaborative est de faire ressentir une masse légère à l'usager même si le robot avec lequel il collabore déplace une lourde charge. Afin que l'humain puisse coopérer de façon intuitive avec le robot, l'humain est dans la boucle de commande et interagit avec le robot. La commande collaborative consiste à mesurer l'intention de l'humain, force appliqué sur la poignée de manutention (capteur d'effort) et de calculer (consigne de vitesse) la réaction dynamique du robot correspondante. | 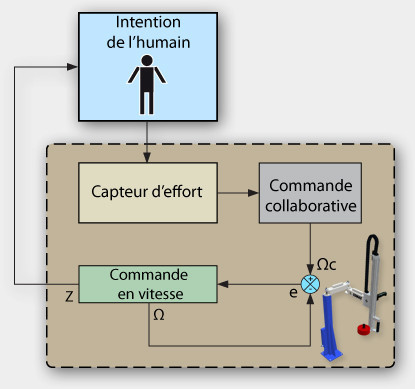 |




