Description structurelle
Chaîne d'énergie
Chacune des 3 roues du robot est mise en mouvement par un ensemble moteur, réducteur.
Le réducteur a un rapport de réduction de 165.
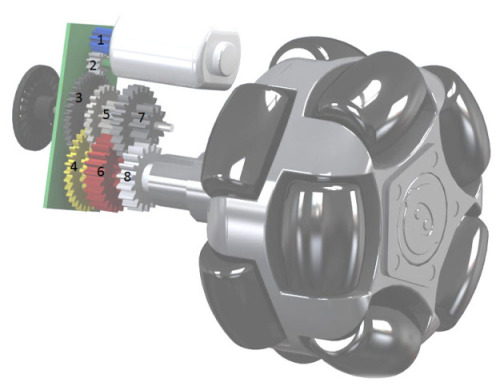
Nombre de dents des roues dentées | Z1=9 | Z2=14 | Z3a=35 | Z3b=11 | Z4a=34 | Z4b=15 | Z5a=21 | Z5b=10 | Z6a=26 | Z6b=8 | Z7a=17 | Z7b=9 | Z8=16 |
Capteur
Un codeur incrémental est placé au niveau d'un axe intermédiaire du réducteur.
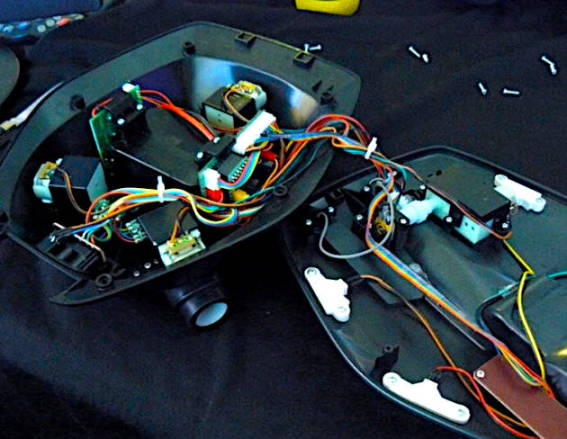
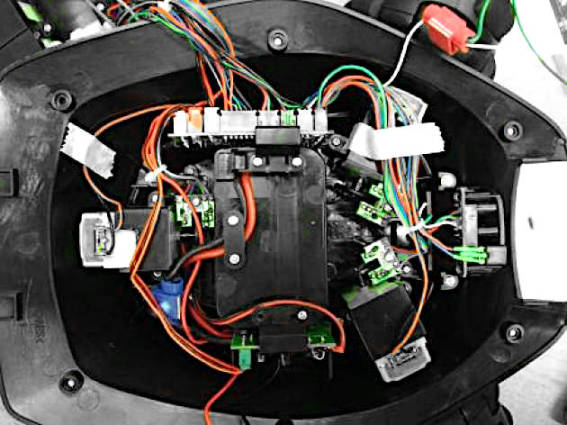
Intérieur