
Fonctionnement de la maquette (avec carte arduino)
Mise en marche de la maquette
|  |
Prise de mesure
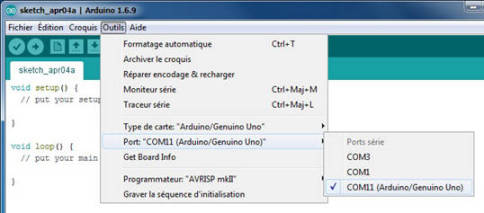
Attention :
Ne pas cliquer sur le bouton "Téléverser", qui enverrait un programme vide vers la carte Arduino !
|  |

Réaliser un essai en boucle fermée en rentrant le chiffre correspondant dans la barre.
Renseigner un réglage du correcteur PID dans la barre :
Correcteur proportionnel Kp | 20 |
Correcteur intégral Ki | 0 |
Correcteur dérivé Kd | 0 |
Puis renseigner une valeur de consigne de position angulaire dans la barre :
Echelon de position angulaire θc (°) | 60 |
Le moteur se met en marche. La roue atteint rapidement son régime permanent.
Vous obtenez des colonnes donnant : Date, Consigne, Sortie, Mesure capteur, Tension moteur.




