
Fonctionnement
Attention :
Ne jamais débrancher les câbles quand le système est allumé.
Mise en marche
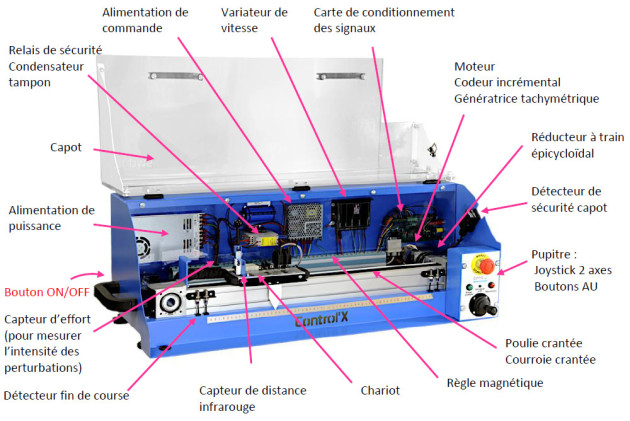
Appuyer sur le bouton "ON/OFF" au dos du carter pour mettre le système sous tension.
Vérifier que le chariot ne recouvre pas les détecteurs fin de course. Ni à gauche, ni à droite. Sinon placer manuellement le chariot au milieu.
Fermer le capot du carter.
Vérifier que le bouton d'arrêt d'urgence n'est pas enclenché.
Appuyer sur le bouton poussoir noir "Armer système" du pupitre.
La diode verte "Variateur prêt" du pupitre s'allume. Il faudra réarmer le système en cas d'ouverture du capot.
|  |
Le chariot du Control'X doit s'initialiser à gauche sur le capteur de fin de course "logiciel", sauf s'il ne l'est déjà.
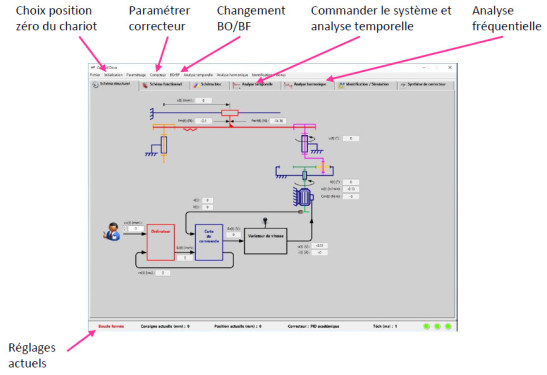
L'interface homme machine suivant apparaît :
Commande BO
|  |
Le système est maintenant commandé directement à partir du signal de commande [V] et n'est pas corrigé.
|  |
Cliquer sur le bouton "Lancer un essai".
L'interface suivant apparaît : | 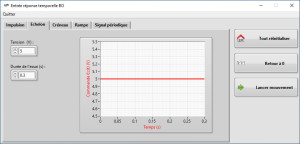 |
Choisir la fonction échelon, sa valeur de tension ainsi que la durée de cet échelon.
Tension de consigne
U0 = 5 V
Durée de consigne
T0 = 0,3 s
Attention :
Si la durée du mouvement est trop importante alors le système s'arrêtera en fin de course, mais cela ne pose pas de problème.
Appuyer sur le bouton "Tout réinitialiser" pour remettre tous les paramètres à zéro et envoyer le chariot à l'extrémité gauche.
Appuyer sur "Lancer mouvement" pour démarrer le mouvement.
Si vous avez besoin, il est possible de définir n'importe quelle position comme la position zéro, pour cela :
- Ouvrir le capot.
- Placer manuellement délicatement le chariot à la position souhaité.
- Dans le menu, cliquer sur Initialisation, puis "Définir comme position zéro". - Fermer le capot. Le bouton "Retour à zéro remettra alors le chariot à la position défini. Le bouton "Tout réinitialiser" efface de la mémoire cette position initiale. | 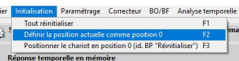 |
Commande BF
| 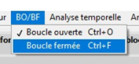 |
Le système est maintenant asservi à partir de sa valeur de consigne et est corrigé.
Dans le menu, cliquer sur "Correcteur".
Sélectionner les valeurs suivantes :
| 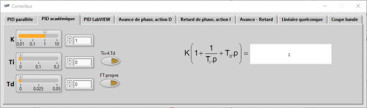 |
Attention :
Le système peut être instable en cas de mauvais réglage, particulièrement pour des valeurs du correcteur proportionnel ou intégral élevé. Lisez bien les valeurs indiquez, soyez prudent dans vos choix de valeurs. En cas d'instabilité, appuyez sans hésiter sur le bouton d'arrêt d'urgence !
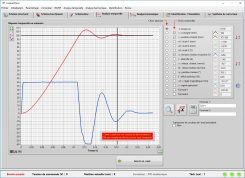
Dans l'onglet, analyse temporelle, cliquer sur les ordonnez que vous souhaitez, par exemple : Consigne, Position chariot, Tension moteur moyenne.
Cliquer sur le bouton "Lancer un essai".
L'interface suivant apparaît : Choisir la fonction échelon, sa valeur de consigne ainsi que la durée de cet échelon.
Appuyer sur le bouton "Tout réinitialiser" pour remettre tous les paramètres à zéro et envoyer le chariot à l'extrémité gauche. Appuyer sur "Lancer mouvement" pour démarrer le mouvement. | 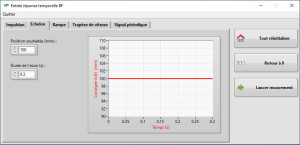 |
Module pendule inversé
Si vous souhaitez passer du module du chariot standard au module pendule inversé pour une étude, appeler le professeur. | 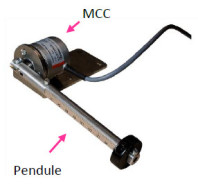 |
Attention :
L'utilisation du mode pendule inversé ne s'effectue qu'en présence du professeur.
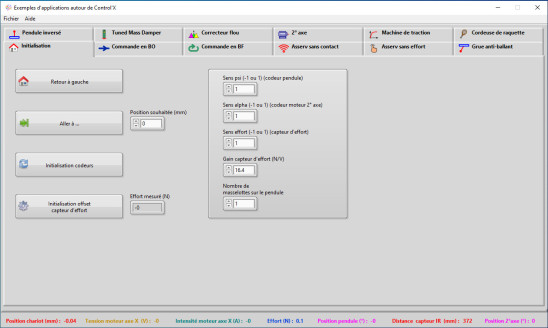
|  |
L'interface suivant apparaît :
|  |
Attention :
Pour la suite, le pendule doit être au milieu du système et immobile vers le bas, il ne doit pas osciller.
Cliquer sur l'onglet "Pendule inversé".
Attention :
Lire toute la suite avant de continuer.
Pour la suite, le système risque des instabilités, positionner une main proche du bouton d'arrêt d'urgence.
Si le système n'a pas réussi, reprendre les étapes à partir de l'onglet Initialisation. |  |




