
Mise en situation

Corder une raquette
Le système industriel dont est extrait Control'X est un robot portique 3 axes Lexium Max R du constructeur Schneider Electric. Ce robot permet d'effectuer du "pick and place" dans le domaine du placement de composants électroniques. Il s'agit d'un processus de précision consistant à positionner des composants électroniques sur des circuits imprimés. Le cœur de la machine est un portique 3 axes avec servomoteurs et variateurs pour obtenir des mouvements hautement dynamiques et une précision maximale. | 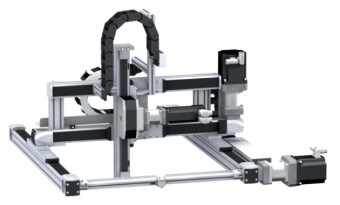 |
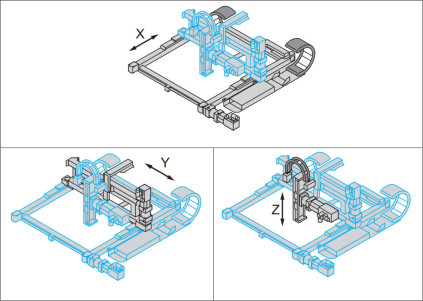
Le Control'X est une version didactique de l'axe industriel commercialisé par l'industriel Schneider, se limitant à l'axe X.
Sur le système réel, on utilise des moteurs brushless avec variateur électrique complexe. Ceux-ci présentent de nombreux asservissements internes avec saturations.
Sur le système didactisée, on utilise unmoteur à courant continu avec variateur paramétrable.
Exemple : Pick and place
Dans le contexte d'utilisation du pick and place, la particularité mécanique de Control'X tient au fait que les efforts extérieurs exercés sur l'axe horizontal sont nuls : le moteur sert uniquement à vaincre les efforts inertiels et les résistances passives internes au mécanisme. Le moteur est souvent en prise directe avec la poulie motrice ou, s'il y a un réducteur, le rapport de réduction est généralement faible.




