
Fonctionnement (avec carte arduino)
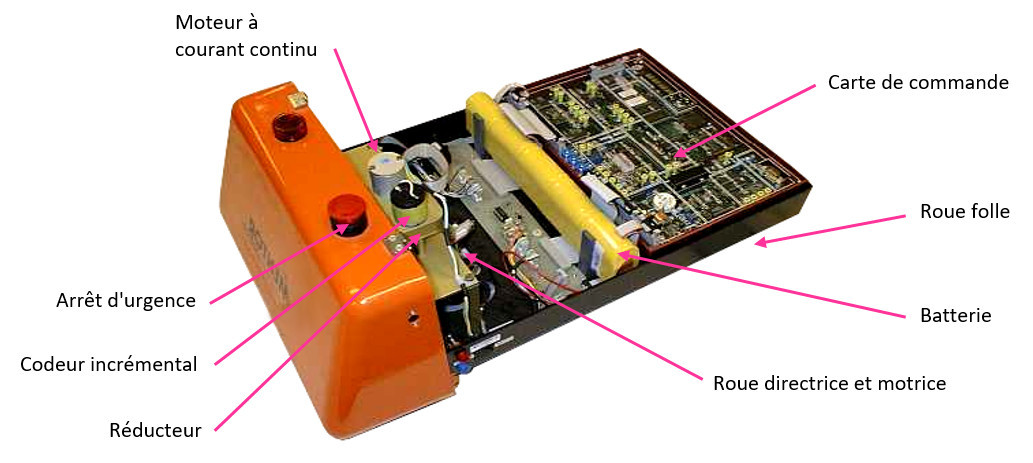
On s'intéresse ici à l'asservissement de la roue avant.
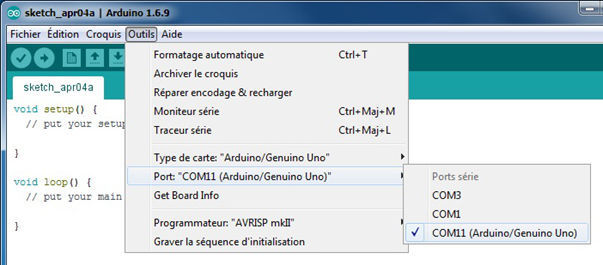
Réaliser la connexion au système :
|  |
Commande
Attention :
Ne pas cliquer sur le bouton "Téléverser", qui enverrait un programme vide vers la carte Arduino !
|  |
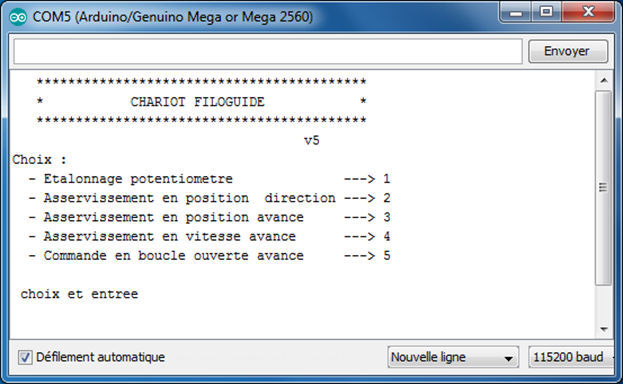
En bas à droite, sélectionner la vitesse d'échange des données entre ARDUINO et PC doit être de 115200 baud (bits/s), cliquer sur "Nouvelle ligne" et cocher "Défilement automatique".
Réaliser un essai "Asservissement de position direction" en rentrant le chiffre correspondant dans la barre.
Renseigner un réglage du correcteur PID dans la barre :
Correcteur proportionnel Kp | 20 |
Correcteur intégral Ki | 0 |
Correcteur dérivé Kd | 0 |
Puis renseigner une valeur de consigne de position angulaire dans la barre :
Echelon de position angulaire θc (°) | 60 |
La roue directrice tourne, puis se stabilise.
Vous obtenez des mesures donnant : Date, Consigne, Sortie, Courant consigne, Mesure, Commande, Courant.




