
Description structurelle
L'Hémomixer se caractérise par deux chaînes fonctionnelles indépendantes :
- l'une pour peser et agiter le prélèvement ;
- l'autre pour clamper (pincer) la tubulure, ce qui a pour effet de stopper l'écoulement du sang.
Le fonctionnement de ces deux sous-ensembles est supervisé par le microcontrôleur du système.
Pesage et agitation
A partir de consignes (volume de prélèvement) en provenance du clavier, mais également de mesures (position et poids du plateau) issues d'un détecteur photoélectrique infrarouge et d'un capteur de force à jauges de déformation, un microcontrôleur commande un hacheur afin de mettre en action un moteur à courant continu.
Le mouvement de rotation du rotor moteur est transmis, via un réducteur, à un transmetteur 4 barres (constitué d'une biellette + une bielle d'agitation + un support plateau + un étrier).
Le transmetteur 4 barres transforme le mouvement de rotation continu du motoréducteur en mouvement de rotation oscillant de l'étrier. Ce mouvement oscillant est transmis au plateau et permet de mélanger l'anticoagulant déjà présent dans la poche de sang prélevé.
Un capteur de force à jauges de déformation embarquant tout le mécanisme (motoréducteur, plateau d'agitation...) permet de mesurer le volume de sang prélevé. Une extrémité du corps du capteur est fixée sur le châssis par l'intermédiaire d'un support tandis que l'étrier repose sur l'autre.
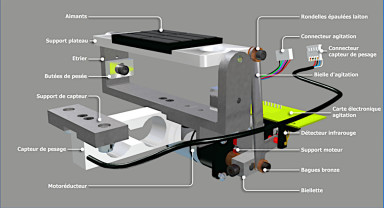
La vitesse d'oscillation est de 10 oscillations par minute.
Le détecteur photoélectrique infrarouge (émetteur + récepteur) permet de détecter la position horizontale du plateau.
Le fond du système est en plexiglas transparent.
Clampage
A partir de consignes (volume de prélèvement) en provenance du clavier, mais également de mesures (position de la tige clampeur et poids du plateau) issues de deux détecteurs photoélectriques infrarouges et d'un capteur de force à jauges de déformation, un microcontrôleur commande un hacheur afin de mettre en action un moteur à courant continu.
Le mouvement de rotation du rotor moteur est transmis, via un réducteur, à un transmetteur bielle-manivelle (constitué d'un disque (la manivelle), d'un ressort (la bielle), d'une bascule, d'un palonnier et d'un sabot).
Le transmetteur bielle-manivelle transforme le mouvement de rotation du motoréducteur en un mouvement linéaire de la tige clampeur. Le ressort est important car il permet de limiter l'effort de pression de la tige clampeur sur la tubulure ou sur tout corps étranger se présentant sous la tige clampeur.
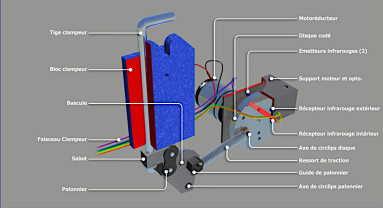
Les deux couples de détecteurs photoélectriques infrarouges (émetteur + récepteur) permettent de connaître les trois positions possibles de la tige clampeur (haut, milieu et bas), grâce à la série de perçages pratiqués sur la périphérie du disque codé. Ces émetteurs récepteurs permettent de coder sur deux bits la position du disque, et donc la position de la tige clampeur :
- position haute : cette position permet d'installer la tubulure dans la rainure du bloc clampeur ;
- position milieu : cette position empêche la tubulure de sortir de la rainure du bloc clampeur sans interrompre l'écoulement du sang ;
- position basse : cette position interrompt l'écoulement du sang en pinçant la tubulure.
Le fond du système est en plexiglas transparent.




